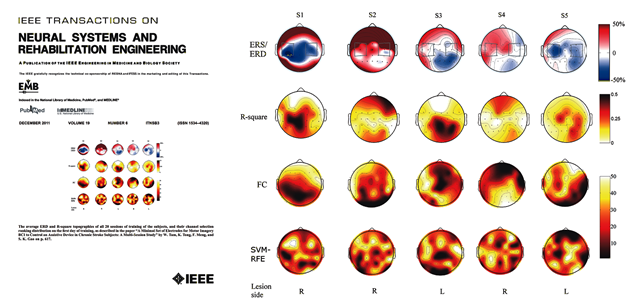
 中风康复训练后的脑电极分布图已被国际顶级期刊IEEE 神经系统与康复工程选为封面故事(2011.12)
中风康复训练后的脑电极分布图已被国际顶级期刊IEEE 神经系统与康复工程选为封面故事(2011.12)
中风是脑血管意外,具有高致残率和死亡率。根据香港医院管理局统计报告2005-2010年度中风入院数字,公立医院的中风入院数字已从1981年的11,062宗增加至在2010年的25,614宗。中风带来的困难与负担影响了中风患者的日常活动。
目前并没有复康工具能训练中风者辨识由脑部发出的正确信号,让他们难以重新学习以大脑控制瘫痪的肢体。“中风脑功能互动机械手系统”突破现有的限制,并可配合“机械手”一同使用,提升中风者的复康治疗效果。有效的中风复康治疗往往需要患者及早展开治疗计划,让他们就其瘫痪肢体进行脑和肌肉的互动训练。肌电图(EMG)和脑电图(EEG)能产生肌肉与大脑皮质的生物电信号。这两个信号都直接关系到自主控制(脑电图通过运动思考规划任务)和外周神经肌肉系统(肌电图负责执行任务),在这个项目中,我们调查肌电图和脑电图意向驱动机器人在中风后的手康复训练,当中使用12个脑电图电极探测自愿意向康复训练的中风患者,研究结果具有高准确度。这个大脑控制算法的发现已发表在国际期刊IEEE神经系统与康复工程(2011.12)上作为封面故事。临床研究在20次的中风康复培训后,肌电互动式机器人训练比被动训练对中风患者有更好的运动功能恢复。该项目开发了一种新的中风康复训练计划,使用中风患者的生物电信号,以提高运动功能恢复。